高精度室內外AR軌跡定位和GPS融合
技術簡介
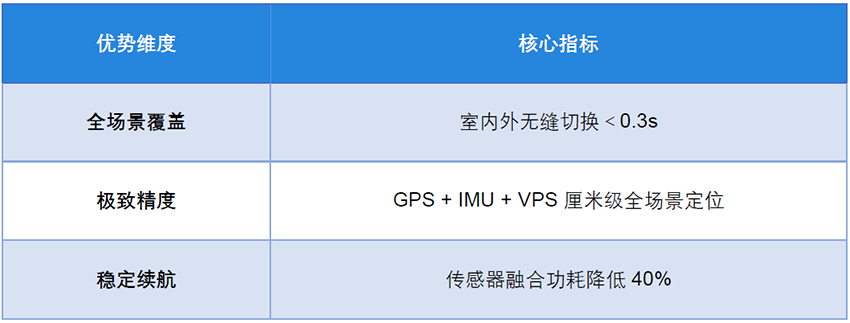
移動端高精度室內外AR軌跡定位與GPS融合技術突破傳統單一定位模式局限,創新性融合衛星定位、IMU慣性測量與VPS視覺定位三大核心模塊,構建“衛星+慣性+視覺”三重冗余定位架構,從根本上解決了室內外定位“斷層、精度低、穩定性差”三大行業痛點。
技術核心價值在于實現“全場景無縫銜接+厘米級精準定位+低耗穩定運行”的三維突破,可直接適配智能手機、AR眼鏡等移動終端,為用戶提供“虛實融合”的空間定位體驗。

核心優勢
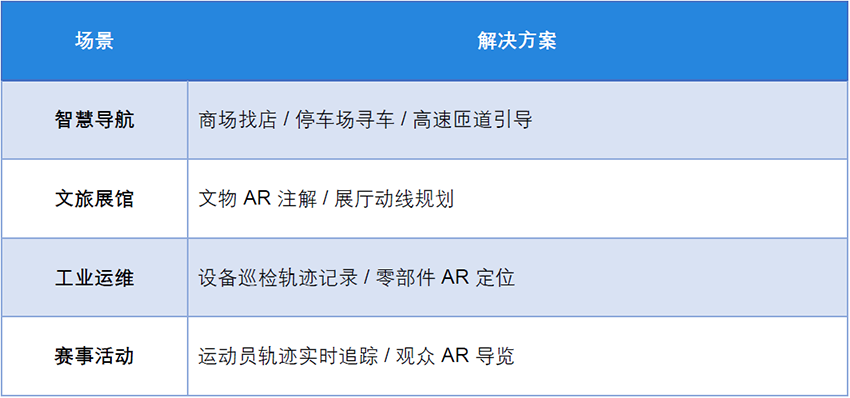
四大應用場景